Кибериммунный дрон-доставщик
Проектирование дрона
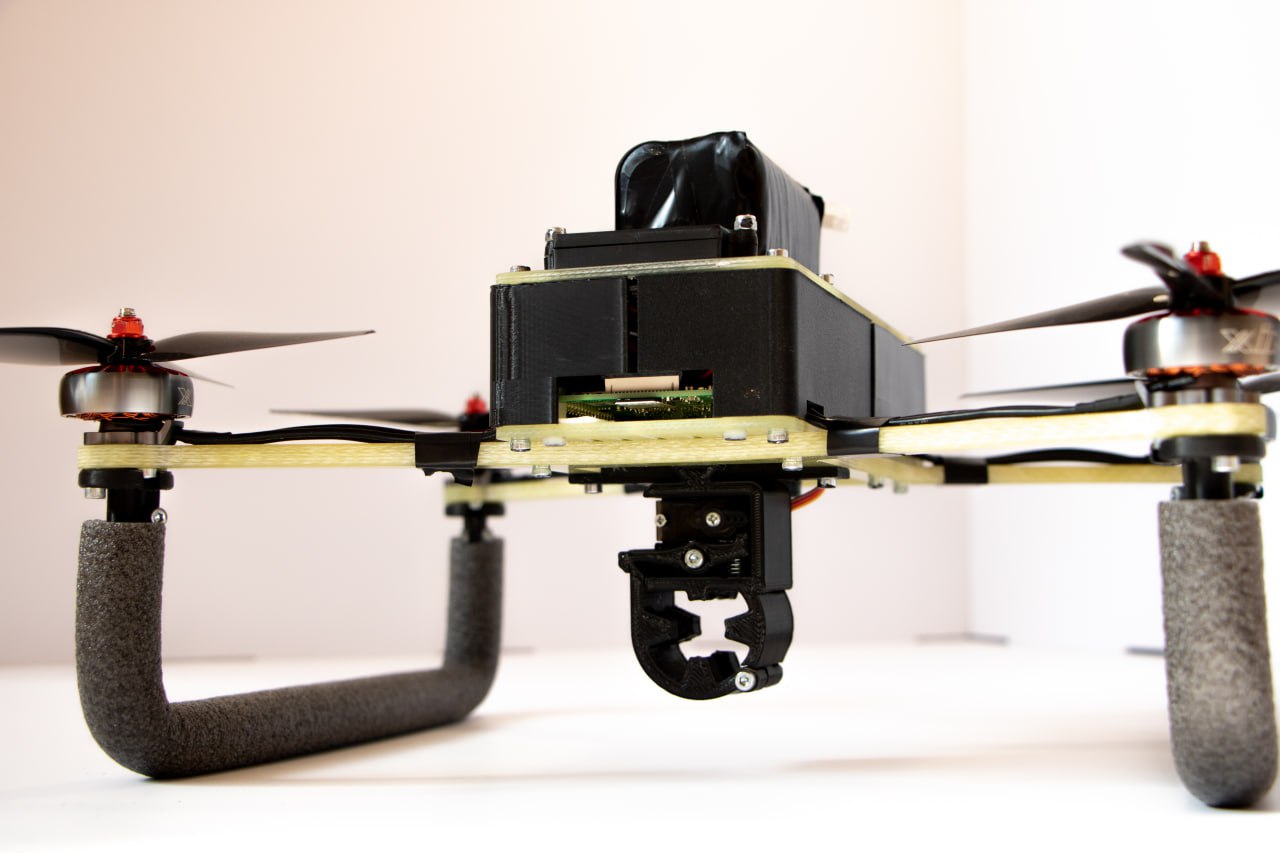
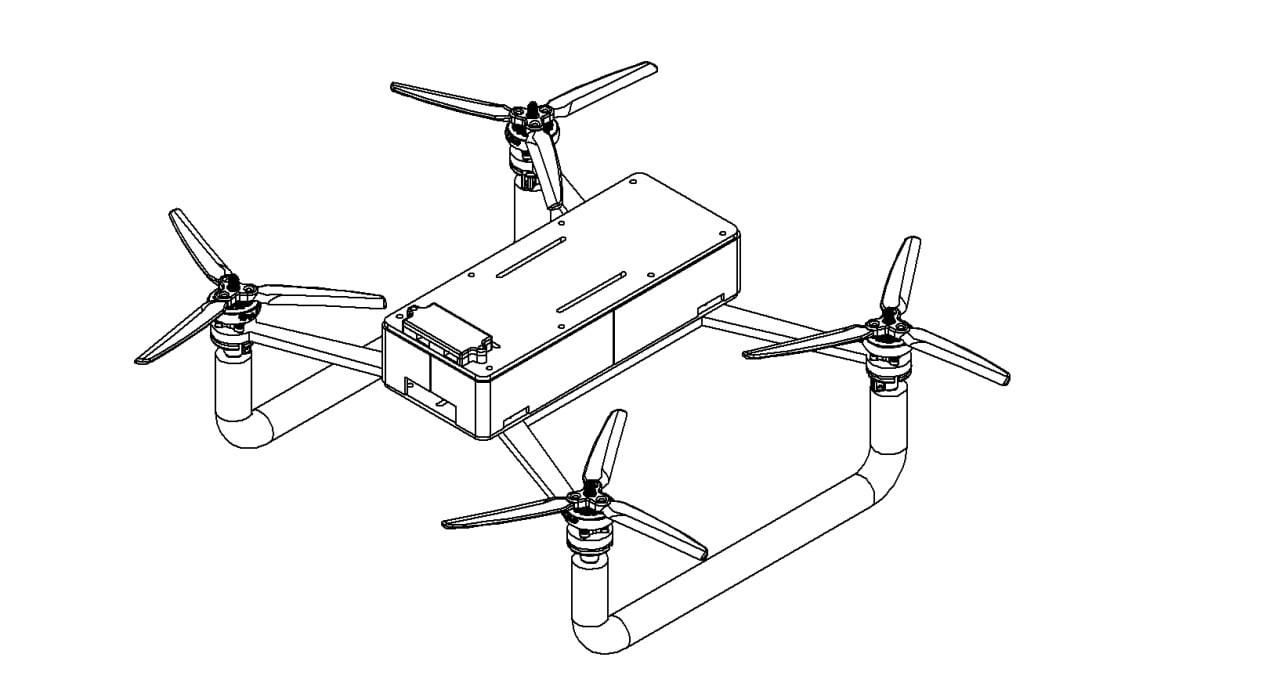
Командой СПбГУ был спроектирован дрон для соревнований по кибериммунной автономности. Ввиду крайне большого количества нестандартных для квадрокоптера электронных компонентов, была поставлена задача проектирования рамы квадрокоптера, которая была выполнена инженерной командой лаборатории. Рама состоит из четырех текстолитовых пластин, а именно: моторама в виде цельного креста, планшайба для установки электроники, верхняя крышка для крепления аккумулятора, малая полка для установки электроники в несколько ярусов. Также были спроектированы защитные стенки, система сброса груза, шасси и крепление для модулей GPS на верхнюю крышку. Результатом стал дрон, отвечающий всем сценариям соревнований по Кибериммунной автономности и полный комплект 3D-моделей, чертежей, списков комплектующих для самостоятельной сборки и производства данной модели дрона, а также полные ТТХ изделия.
Ссылка на репозиторий.
| Параметр дрона | Значение |
|---|---|
| Взлетная масса | 913 грамм квадр + 201 грамм аккум = 1114 грамм общий вес |
| Размеры в разложенном состоянии | В разложенном состоянии (без пропеллеров) 308*263*143 (Д × Ш × В) |
| Размер по диагонали | 362,6 мм |
| Макс. скорость взлета | в целях безопасности ограничена 3-5 м/с |
| Макс. скорость снижения | стандартно 2 м/с, на высоте ниже 1 м замедляется до 1 м/с |
| Макс. полетная скорость (над уровнем моря, без ветра) | 2-3 м/с ограничена 5 м/с |
| Макс. потолок над уровнем моря | 200 м |
| Макс. полетное время (без ветра) | 30 минут |
| Макс. время зависания (с ветром) | 23 минуты |
| Макс. полетное расстояние | 6 км |
| Макс. допустимая скорость ветра | 0-5 м/с комфортный 5-10 м/сек нагруженный 10-12 м/с экстремальный |
| Макс. угол наклона | 25° |
| Диапазон рабочих температур | ОТ -10° до 40° C |
| Глобальные системы позиционирования (GNSS) | GPS + Galileo + BeiDou + ГЛОНАСС |
| Параметр аккумулятора | Значение |
|---|---|
| Емкость | 4000 мА·ч |
| Напряжение | 14.8 В |
| Предел напряжения зарядки | 16.4 В |
| Тип аккумулятора | Литий-ионный 4S |
| Энергетика | 59.2 Вт·ч |
| Масса | 292 г |
| Диапазон температур зарядки | +5°…+40° C |
Проектирование отдельных аппаратных узлов для управления полезной нагрузкой и питанием моторов
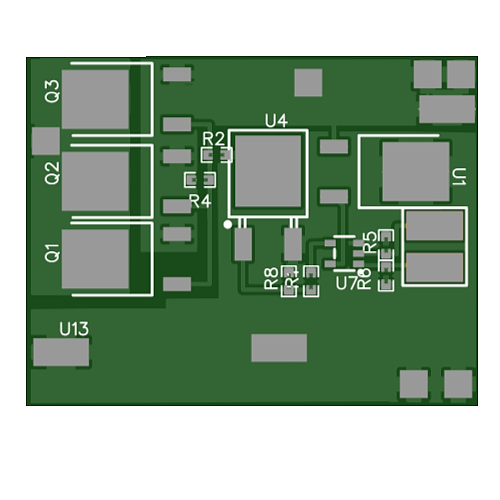
Нами был спроектирован модуль на трех силовых транзисторах, способный коммутировать токи до 50 ампер, что обеспечивает почти двухкратный запас относительно максимально возможного потребления ВМГ. Также в ходе разработки было принято решение имитировать работу системы спасения борта с помощью звукового сигнала, но, поскольку KasperskyOS не имеет встроенных функций генерации ШИМ-сигнала, было принято решение разработать плату-генератор. Таким образом для включения имитации аварийной системы достаточно подать логическую единицу на плату-генератор.
Ссылка на схемы.
Разработка SDK для управления аппаратными узлами дрона на KasperskyOS
НОЦ "МРИИ" СПбГУ было разработан SDK для модуля безопасности, работающего под управлением KasperskyOS (используется KasperskyOS Community Edition SDK):
- Протокол связи между автопилотом и бортовым компаньон компьютером на операционной системе KasperskyOS.
- Функции для обработки информации с датчиков GNSS и барометра.
- Протокол обмена данными с сервером ОрВД.
- Функции управления специальной периферией, а именно модулем отключения моторов, модулем отключения сервопривода, модулем генератора звука.
- Логирование на sd-карту и на сервер ОРВД.

Разработка киберпрепятствий в Ardupilot
По сценарию соревнований, проводимых в рамках фестиваля «Архипелаг 2024» участники должны были с помощью подготовленного лабораторий СПбГУ SDK обеспечить пролет дрона по трассе, согласно поставленному заданию. Была поставлена задача заложить вредоносный код в исходный код Ardupilot, который в заранее известных местах трассы изменял бы полетное задание и создавал другие нештатные ситуации. Был утвержден следующий список киберпрепятствий:
- Несанкционированный сброс груза
- Увеличение скорости полета
- Изменение маршрутного задания

Разработка системы ОрВД
По техническому заданию к договору аппаратно-программный комплекс должен был включать в себя систему организации воздушного движения. Это часть системы, отвечающая за санкционирование полетного задания и начало его выполнения оператором-судьей, а также за сбор информации о местоположении дронов и прочей информации, в дальнейшем именуемой телеметрией. В рамках выполнения этой задачи были выполнены следующие работы:
- Разработка API для выполнения HTTP запросов бортом к Apache серверу
- Разработка WEB-интерфейса для санкционирования взлета и полетного задания
- Разработка протокола обмена данными с бортом
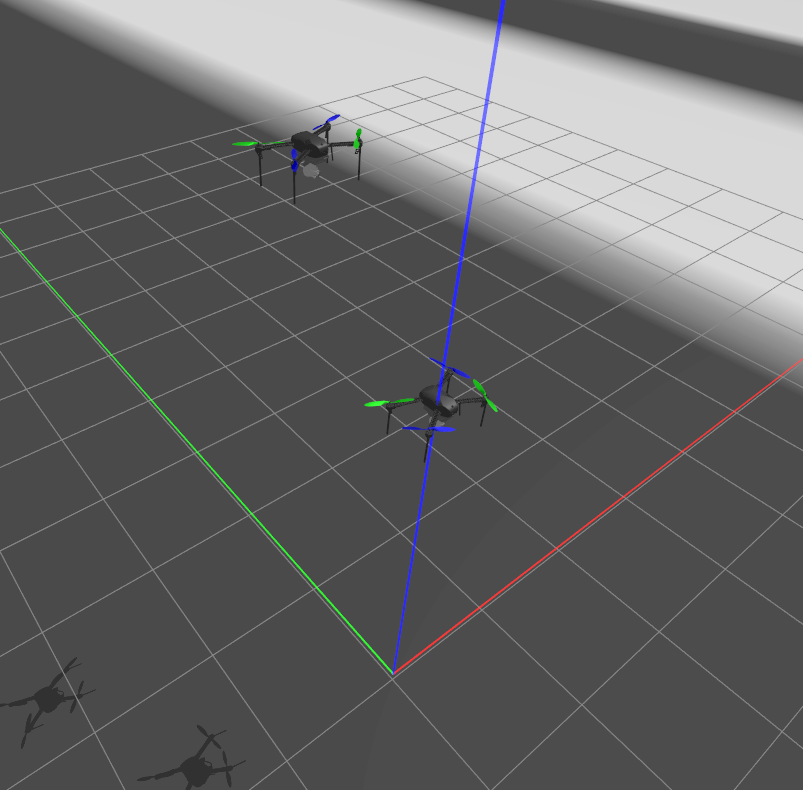
Разработка цифрового двойника для имитации полета
По техническому заданию к договору, помимо реальных полетов необходим был симулятор, достаточно точно имитирующий полет. Командой СПбГУ был выбран SITL (поставляемый с Ardupilot симулятор). Полное программное решение цифрового двойника состояло из следующих компонентов: Сервер ОрВД, SITL, бинарный файл прошивки Ardupilot, программа для формирования маршрутного задания и контроля полета APM Planner. Система имитирует полет дрона, в том числе с киберпрепятствиями.
Ссылка на репозиторий.